
ჰაერის ფილტრის რეგულატორი EPV2 სერია ელექტრონული პნევმატური პროპორციული

დეტალები
Min მიწოდების წნევა: დააყენეთ წნევა +0.1MPa
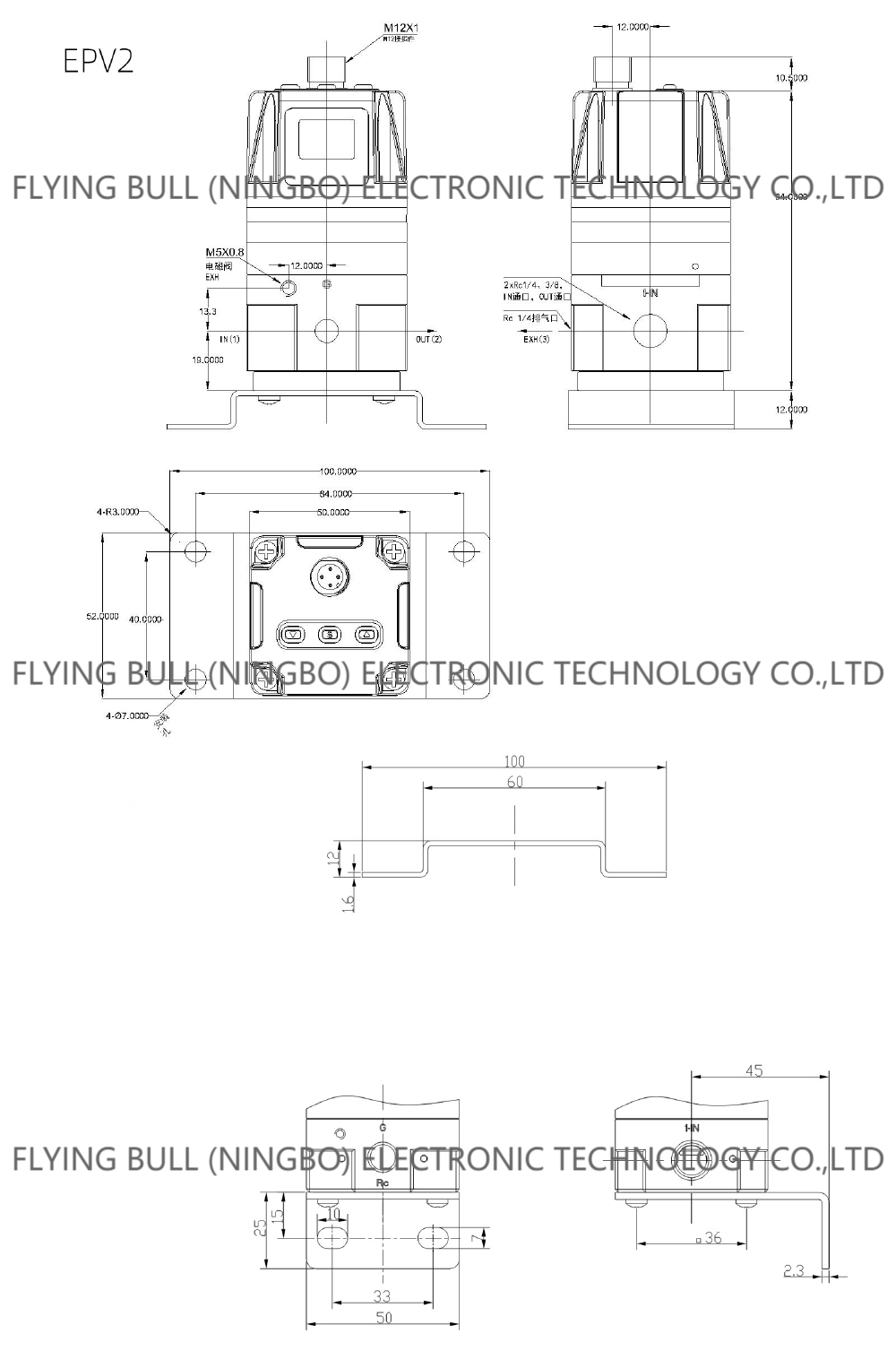
მოდელის ნომერი: EPV2-1 EPV2-3 EPV2-5
დააყენეთ წნევის დიაპაზონი: 0.005 ~ 0.5 მპა
შეყვანის სიგნალის მიმდინარე ტიპი: DC4 ~ 20MA, DC0 ~ 20mA
შეყვანის სიგნალის ძაბვის ტიპი: DC0-5V, DC0-10V
გამომავალი სიგნალის შეცვლის გამომავალი: NPN, PNP
DC: 24V 10%
DC: 24V 1.2 ა -ზე ნაკლები
შეყვანის წინაღობა მიმდინარე ტიპი: 250Ω ნაკლები ვიდრე
შეყვანის წინააღმდეგობის ძაბვის ტიპი: დაახლოებით6.5kΩ
წინასწარ შეყვანა: DC24VTYPE: დაახლოებით 4.7k
ანალოგური გამომავალი: "DC1-5V (დატვირთვის წინაღობა: 1kΩmore ვიდრე)
DC4-20MA (დატვირთვის წინაღობა: 250 კმ
გამომავალი სიზუსტე 6%(FS) ფარგლებში "
ხაზოვანი: 1%FS
დუნე: 0.5%FS
განმეორებადობა: 0.5%FS
ტემპერატურის დამახასიათებელი: 2%FS
წნევის ჩვენების სიზუსტე: 2%FS
წნევის ჩვენების დამთავრების შემდეგ: 1000GRADUATION
გარემოს ტემპერატურა: 0-50 ℃
დაცვის კლასები: IP65
მიწოდების უნარი
გაყიდვების ერთეულები: ერთი ნივთი
ერთი პაკეტის ზომა: 7x4x5 სმ
ერთი მთლიანი წონა: 0.300 კგ
პროდუქტის შესავალი
ელექტრო პროპორციული სარქველი არის ელექტრონული კონტროლის საშუალებით ნაკადის გასროლის კონტროლის რეალიზაცია. ელექტრო კონტროლის წნევის მარეგულირებელი მოწყობილობა შედგება საჰაერო შესასვლელი და გამონაბოლქვის მარეგულირებელი შეცვლა სოლენოიდის სარქველი, წნევის გამოვლენის სენსორი და საკონტროლო წრე. როდესაც არსებობს შეყვანის სიგნალი, იხსნება სოლენოიდის სარქველი, გამონაბოლქვი სოლენოიდის სარქველი დახურულია, მთავარი სარქველი აწვდის ჰაერს საპილოტე პალატაში, ხოლო მთავარი სარქვლის ბირთვი მოძრაობს მეორადი წნევის გამოსავალზე.
სტრუქტურული პრინციპის რედაქტირება
როდესაც შეყვანის სიგნალი იზრდება, ჰაერის მიწოდებისთვის სოლენოიდის სარქვლის საპილოტე სარქველი 1 უკუქცევს, ხოლო ჰაერის გამონაბოლქვისთვის სოლენოიდის საპილოტე სარქველი არის გადატვირთვის მდგომარეობაში, მაშინ საჰაერო მიწოდების წნევა შედის საპილოტე პალატაში 5 SUP პორტიდან სარქველიდან 1, ხოლო პილოტის პალატაში ზეწოლა იზრდება 4 დიაფრაგმა 2 იხსნება და გამონაბოლქვი სარქვლის ბირთვი 3 დახურულია, რის შედეგადაც გამომავალი წნევა ხდება. ეს გამომავალი წნევა იკვებება საკონტროლო წრეში 8 წნევის სენსორის მეშვეობით. იმის გამო, რომ არ არსებობს nozzle baffle მექანიზმი, სარქველი არ არის მგრძნობიარე მინარევების მიმართ და აქვს მაღალი საიმედოობა. სტრუქტურული პრინციპის რედაქტირება
როდესაც შეყვანის სიგნალი იზრდება, ჰაერის მიწოდებისთვის სოლენოიდის სარქვლის საპილოტე სარქველი 1 უკუქცევს, ხოლო ჰაერის გამონაბოლქვისთვის სოლენოიდის საპილოტე სარქველი არის გადატვირთვის მდგომარეობაში, მაშინ საჰაერო მიწოდების წნევა შედის საპილოტე პალატაში 5 SUP პორტიდან სარქველიდან 1, ხოლო პილოტის პალატაში ზეწოლა იზრდება 4 დიაფრაგმა 2 იხსნება და გამონაბოლქვი სარქვლის ბირთვი 3 დახურულია, რის შედეგადაც გამომავალი წნევა ხდება. ეს გამომავალი წნევა იკვებება საკონტროლო წრეში 8 წნევის სენსორის მეშვეობით. იმის გამო, რომ არ არსებობს nozzle baffle მექანიზმი, სარქველი არ არის მგრძნობიარე მინარევების მიმართ და აქვს მაღალი საიმედოობა.
პროდუქტის სურათი
კომპანიის დეტალები







კომპანიის უპირატესობა
ტრანსპორტირება

კითხვები






